

The stand is designed for assembly and automatic welding of end walls in the reverse position and robot-aided arc welding in normal position.
All the operations of clamping and welding of the item are performed automatically, operator just needs to control the welding process and provide loading/unloading of the workpieces. Applying of Festo intellectual pneumatic automation allows to control workpiece assembly accuracy, to inform the worker about deviations, minimizes human factor.
After welding from the reverse side the end wall is rotated by 1800 with a built-in rotator and laid on the stand for welding in normal position, then it is fixed and welded with a welding robot.
Specifications:
| 1. | Overall dimensions of the items to be assembled, mm | 2930х264х2492 |
| 2. | Weight of the item to be assembled, kg | 593,5 |
| 3. | Stand for assembly and welding of the end wall in the reverse position: | |
| Parts fixation principle | pneumatic | |
| 4. | Stand for welding of the end wall in normal position: | |
| End wall fixation principle | pneumatic | |
| 5. | Rotator: | |
| Rotator drive | electromechanical | |
| Power, kW | 3,0 | |
| 6. | Gantry for automatic welding of covering with framework: | |
| Gantry drive | electromechanical | |
| Welding speed, m/min | 0,5…1 | |
| Cruising speed, m/min | 7,5 | |
| Speed regulation principle | frequency | |
| Carriage travel drive | electromechanical | |
| Seam tracking principle | mechanical | |
| Seam type | lap | |
| Lifting-lowering drive of welding torch | pneumatic | |
| Number of seams welded simultaneously, piece | 1 | |
| Power source | Fronius | |
| 7. | Gantry for robot-aided welding of end wall in normal position: | |
| Gantry drive | electromechanical | |
| Travel speed, m/min | 7,5 | |
| Speed regulation principle | frequency | |
| Welding robot type | Fanuc | |
| End wall clamping principle | pneumatic | |
| Power source | Fronius | |
| 8. | Air pressure in air main, MPa | 0,5…0,6 |
| 9. | Installed capacity excluding welding equipment, kW | 11,0 |
| 10. | Overall dimensions of the stand, mm | 12120х7280х3880 |
| 11. | Weight, kg | 12152 |
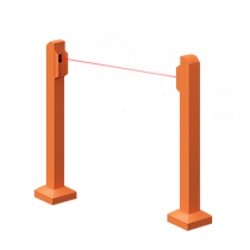
Safety
Laser barrier to protect staff
Prevents staff from entering potentially hazardous areas during machine operation. If the safety border is crossed, the barrier stops the machine operation
Barrier
The enclosure consists of a metal structure and curtains for protection against ultraviolet rays. Sensors are installed on the barrier to switch off the complex in case of human intrusion in order to exclude injuries to people.

SPTA kit
Extended SPTA kit for 12 months of operation
Includes a set of components which require regular replacement, providing minimum 12 months of operation.

